10_mBot_紅外線感測器的應用:遙控汽車超簡單
1.
紅外線感測器包含紅外線發射(IR_T:Infrared Remote Transmitting)與紅外線接收(IR_R:Infrared Remote Receiving)兩個功能,mBot機板上有一顆紅外線發射器與一顆紅外線接收器,搭配紅外線遙控器,便可以將mBot設計成遙控汽車。


2.
我們可以透過mBlock的程式積木,偵測這個紅外線感測器的值,判斷紅外線遙控器是哪一個按鍵被按下了,再來控制mBot自走車的行為。
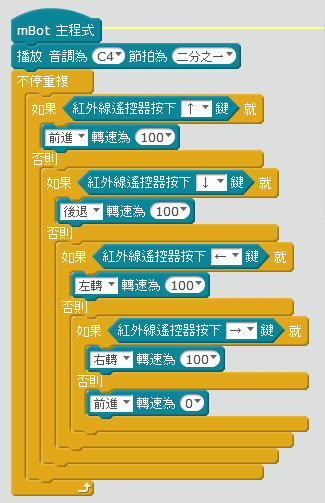
3. 初階遙控車需求:按下往左鍵,自走車往左轉,按下往右鍵,自走車往右轉,按下往前鍵,自走車向前走,按下往後鍵,自走車向後走,程式可以設定以定速行進。
4. 進階遙控車需求:除了初階遙控車功能外,按下數字鍵時可以改變行進速度,數字愈大,速度愈快,數字零則恢復最慢速。
5. 程式設計提醒1:最慢速若設為50,則有可能動力不足,無法移動,此時可以調整最慢速,將速度設為大一些,應該就可以移動。
6. 程式設計提醒2:可以設一個變數來記錄速度。
7. 程式設計提醒3:測試前記得先更新韌體再測試,可以先以USB線連線測試、2.4G無線序列埠連接測試,最後再上傳到mBot板子上測試。
8. 初階遙控車參考程式片段:
9. 進階遙控車參考程式片段:

10. 程式完成了,來玩一下自己設計的遙控車,是不是超有成就感的?
沒有留言:
張貼留言